Short human exemplars
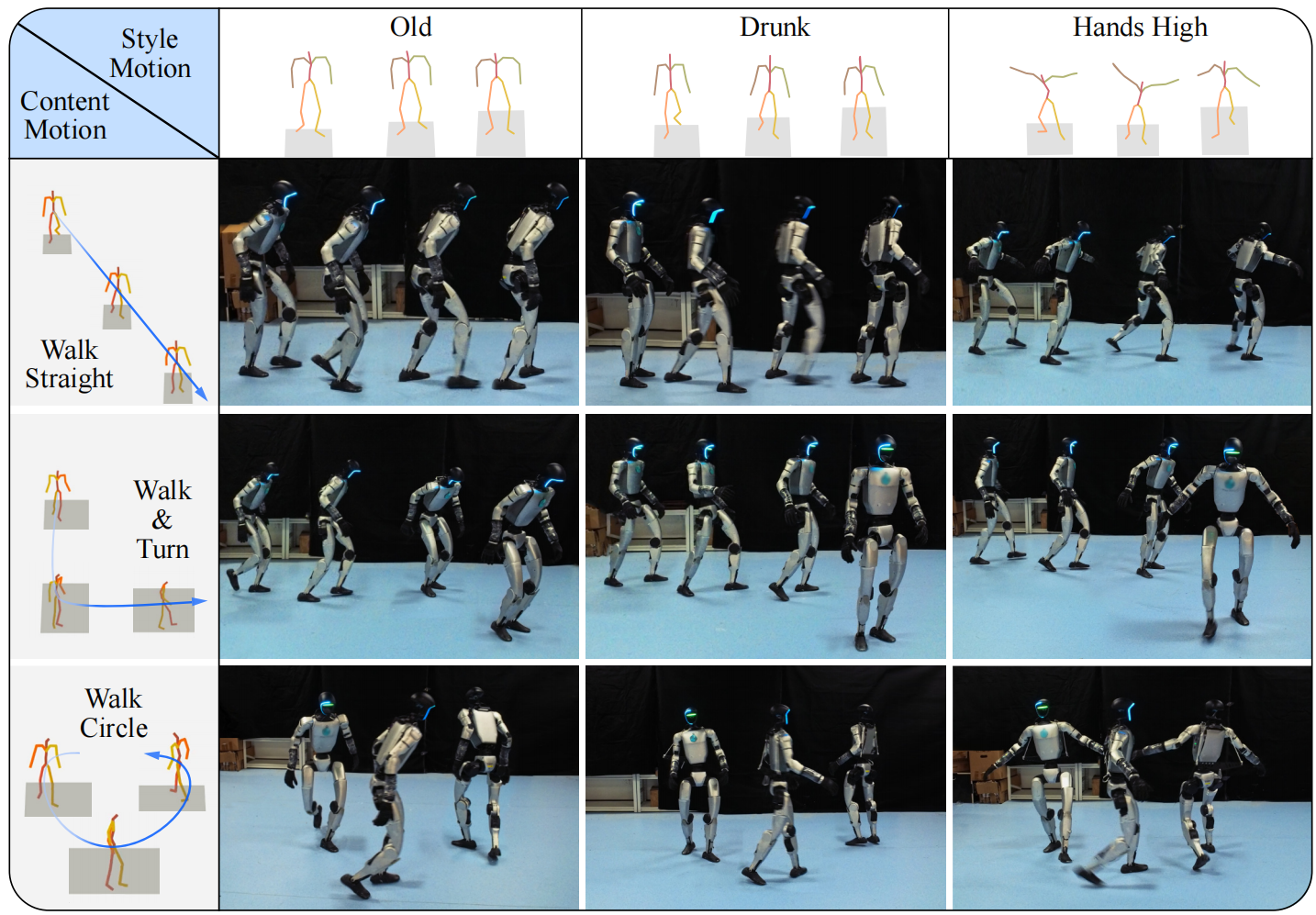
Human-derived cues such as gait rhythm, posture, arm swing, and body sway are transferred to new motion contents.
Project Page
Exemplar-driven expressive motion generation for humanoid robots, combining physics-aware latent diffusion with deployable whole-body tracking on Unitree G1.
University of Science and Technology of China; Xi'an Jiaotong University; Lanzhou University
Short human motion exemplars can become reusable bionic style sources for expressive humanoid behavior.
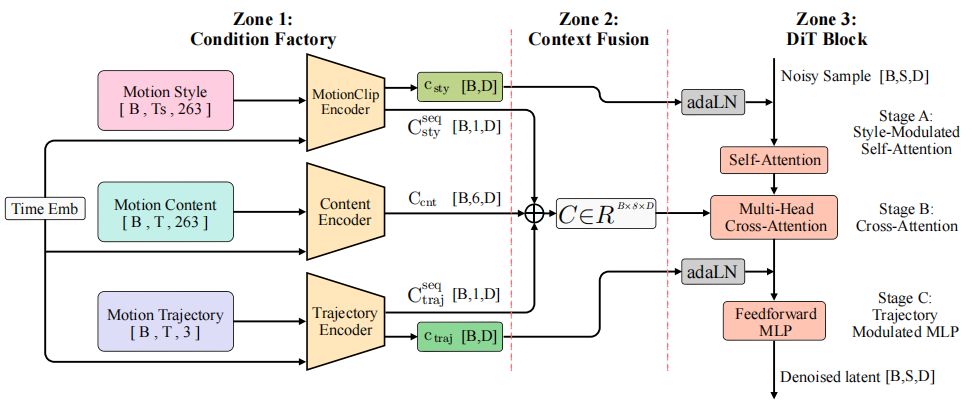
Expressive whole-body motion is important for humanoid robots operating in human environments, where robots need to remain stable while presenting readable and adjustable body behaviors. This work proposes a bionic generation-to-control framework that transfers style from a short human motion exemplar to a target content motion.
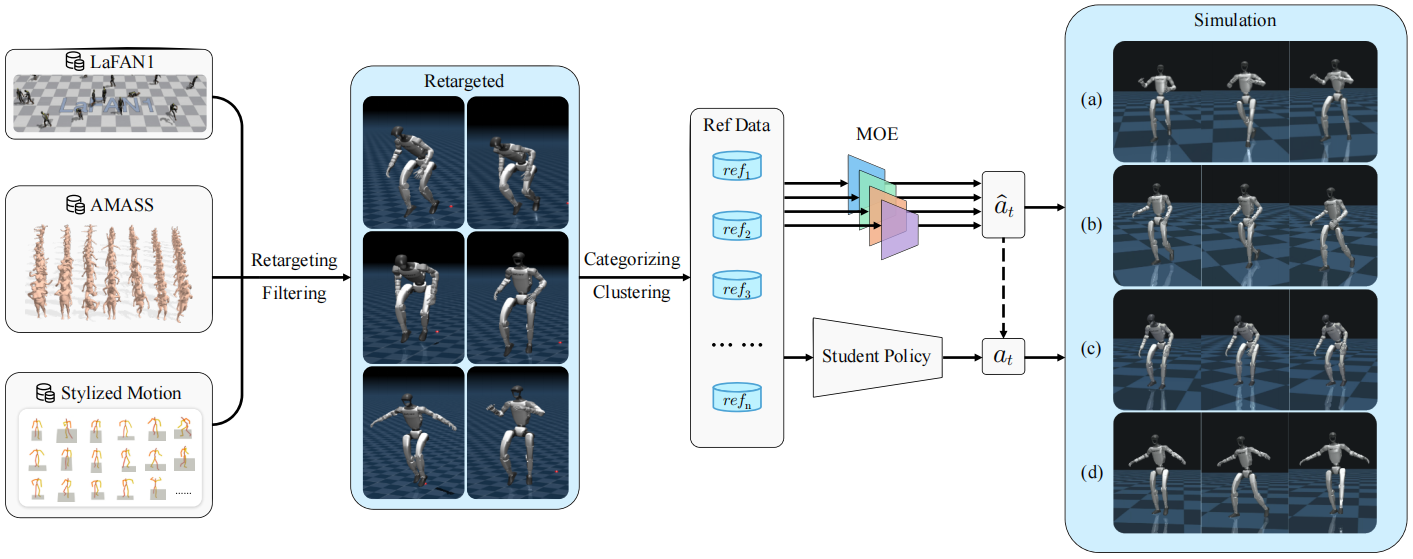
The generated stylized references are regularized for contact consistency and temporal smoothness, converted into G1-compatible robot references, and executed by a preview-based whole-body tracking policy trained with a cluster-and-distill strategy.
The pipeline connects expressive style generation with robot-oriented conversion, tracking, and deployment.
Human-derived cues such as gait rhythm, posture, arm swing, and body sway are transferred to new motion contents.
Content, style, and trajectory streams are fused as conditional context for whole-body reference generation.
Contact-consistency and temporal-smoothness terms reduce stance-foot drift and high-frequency joint artifacts.
Generated motions are converted to 29-DoF Unitree G1 references and tracked with a distilled whole-body policy.
Evaluation combines perceptual motion metrics with robot-oriented feasibility and closed-loop execution.
| Method | FMD | CRA (%) | SRA (%) | FSF | Apos | Jpos | Sim. SR (%) |
|---|---|---|---|---|---|---|---|
| MotionDiffuse | - | - | - | 0.006233 | 0.497825 | 0.339368 | 27.93 |
| Motion Puzzle | 113.31 | 26.31 | 46.33 | 0.005853 | 0.568928 | 0.822193 | 67.14 |
| MCM-LDM | 34.78 | 33.62 | 58.66 | 0.006273 | 0.372012 | 0.316419 | 59.81 |
| Ours | 39.81 | 35.18 | 55.55 | 0.004722 | 0.307976 | 0.283434 | 96.02 |
Classifier-free guidance adjusts style intensity while the controller keeps the motion inside an executable range.

Increasing the guidance scale strengthens recognizable human-like cues such as slower gait rhythm and upper-body sway. The reported hardware evaluation covers 25 Unitree G1 trials for each guidance scale in {0, 0.25, 0.5, 0.75, 1.0}.
Across 125 total trials, the robot completed 120 trials without falling, safety shutdown, or unrecoverable tracking divergence. Most failures occur at larger guidance scales, where stylization can increase sway and stance-timing difficulty.
@misc{huang2026bionic,
title = {Bionic Human-Motion Style Transfer for Physically Executable Whole-Body Control of Humanoid Robots},
author = {Huang, Tianchen and Zhao, Mingkuan and Gao, Yang and Yuan, Feiyang and Gu, Junchi and Zhang, Xiaohu and Zhao, Dongdong and Yan, Shi and Wang, Yu and Gao, Wei and Zhang, Shiwu},
year = {2026},
eprint = {2606.03536},
archivePrefix = {arXiv},
primaryClass = {cs.RO},
url = {https://arxiv.org/abs/2606.03536}
}